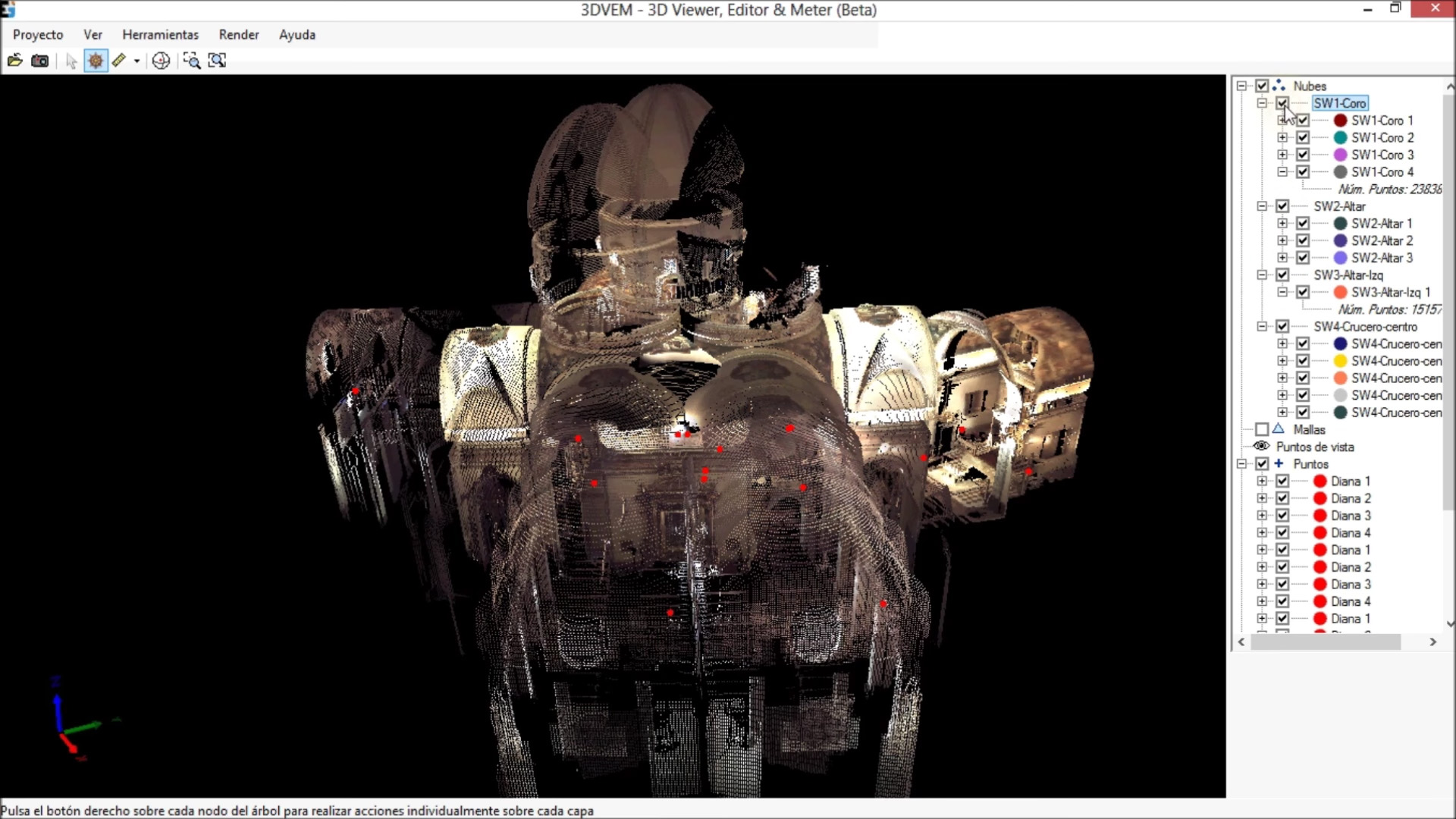
Point clouds inside a church unaligned.

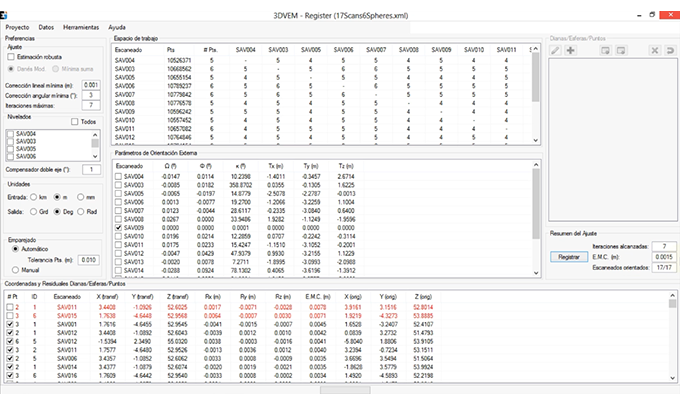
3DVEM — Register is a low cost software that solves the registration, also known as alignment or relative orientation, of point clouds, point clouds and 3D models, as well as 3D models, all of them scaled, from a sufficient number of matching (homologous) features identified in a variety of ASCII formats.
Matching features may be centres of targets and spheres, among others, as well as natural points or points extracted from digital models. Numbering/naming of features is initially random, since the software sets automatically features, and solves the indirect registration by means of either least squares or robust estimation, depending on the option selected by the user.
3DVEM — Register advantages:
Point clouds inside a church unaligned.
Point clouds after registration in 3DVEM — Register.
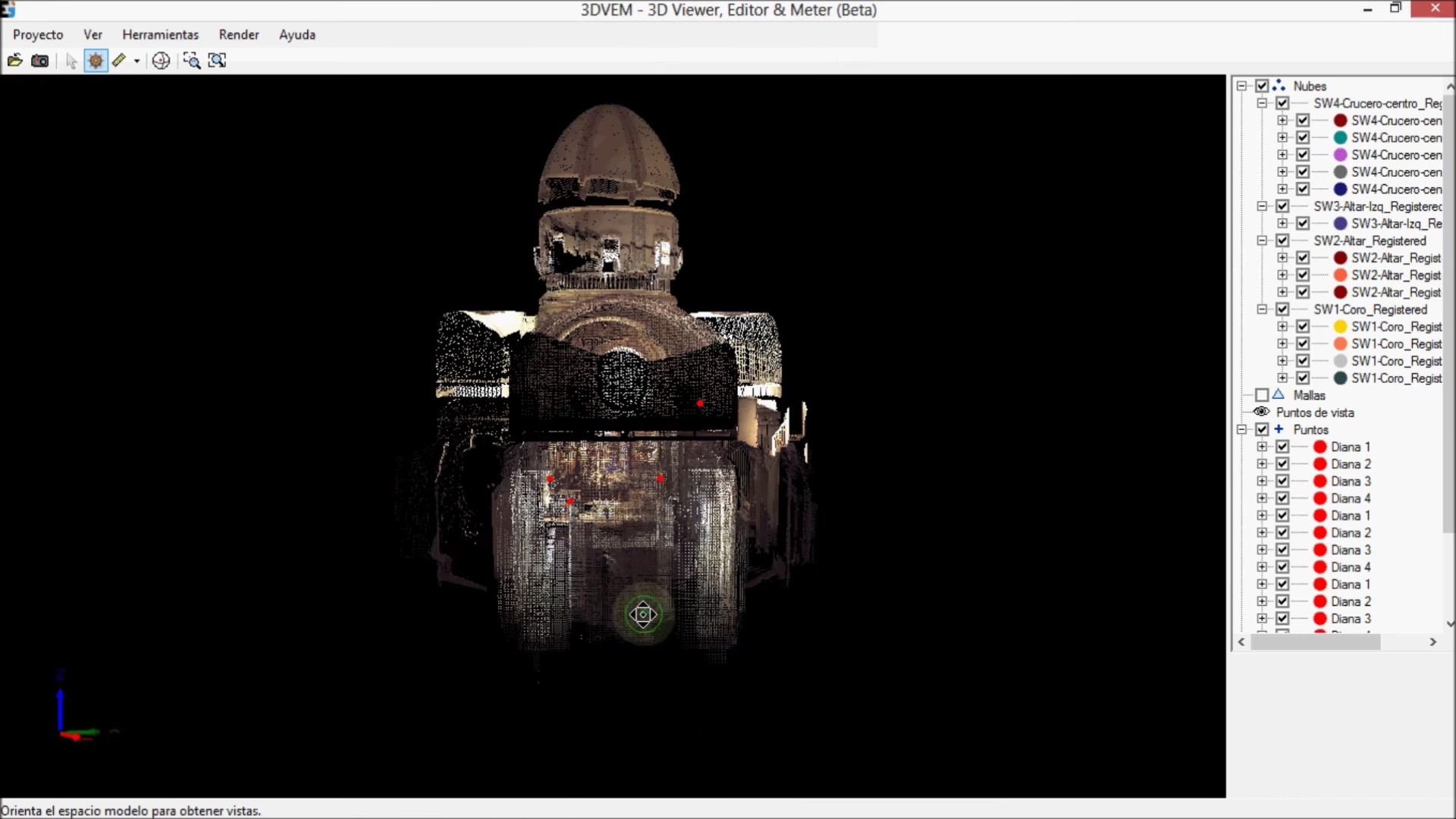
Point clouds registration in 3DVEM — Register.
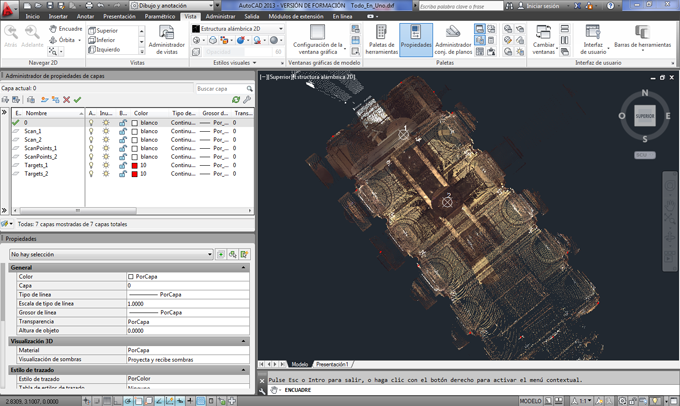
DXF file import. The CAD file is structured in layers: point clouds, stations and targets.
Contact us to download the software. If you want, you can check some of the available tutorials: